
GDM-3350
4in1映像ロギング対応 CAN/無線LANブリッジ
屋外利用を考慮した筐体設計、4in1のカメラ映像マルチビューに対応
概要
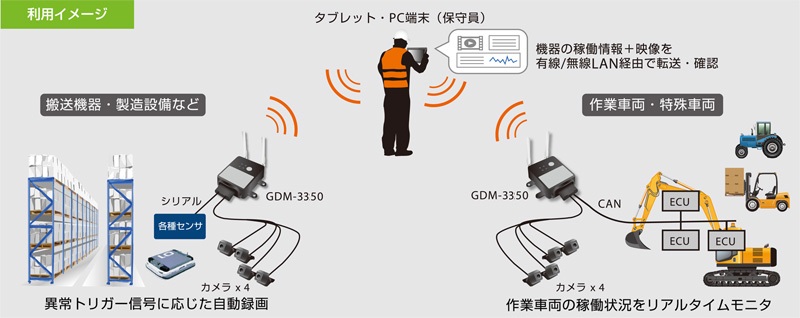
GDM-3350は、作業車両や搬送・製造機器など産業機械の稼働情報と周辺映像を無線LANで伝送するブリッジです。
従来、専用端末・カメラを用いて収集していた機器の稼働情報や映像は、有線もしくは外部記録メディアで転送・保存されることが多く、"動き回る"機械を止めずに運用することは困難でした。本製品は無線LANを活用することで、離れた場所からでも、機械を動かした状態でリアルタイムに稼働情報を市販タブレット・PC端末でモニタできるため、現場の作業効率を大幅に向上させることができます。また、カメラ映像は本機内部のストレージに蓄積・無線転送することもできますので、不意の機器停止などのトラブル解析や復旧作業の短縮も可能にします。
特長
各種インタフェース対応
産業用車両や機械で利用されるインタフェース(CAN x2、RS-232C x1)、有線LAN、無線LAN(IEEE 802.11a/b/g/n)に対応しています。
複数の映像ロギング方式をサポート
車両CAN情報とともに周辺映像を同時に保存することで、効率的な稼働・エラー分析ができます。録画方式はCAN/シリアル/デジタル入力信号によるドラレコ録画、連続録画(自動上書き対応)、手動録画など複数の方式を選択することができます。
リアルタイム映像転送
稼働データと映像をリアルタイムで有線・無線LAN伝送できます。
稼働状態でのモニタリングが可能になることで、産業車両や機械の周辺情報の監視や遠隔サポート・操作支援に役立ちます。
4 in 1の映像マルチビューに対応
最大4台のカメラを接続でき、1画面に集約して表示できます。さまざまな角度・場所からの映像を同時に録画/伝送することで、効率的な状態観察ができます。
屋外の利用も可能
温度・湿度ともに変化の激しい場所でも設置することができます。また、防水・防塵対策を考慮した筺体設計になっています。
専用アプリケーション不要の簡単設定・簡単録画/閲覧
Webブラウザ※1から本機にアクセスすることで、カメラ設定や映像閲覧ができます。本体内蔵ストレージに保存された映像データは、FTP、またはWebブラウザからダウンロード※2することができます。
※1 対応ブラウザ:Google Chrome および Microsoft Edge
※2 ブラウザからダウンロードの場合は、最新録画ファイルのみ
連携ソフトウェア
開発キット(別売)
弊社製品や周辺PCにアプリケーションを追加するためのソフトウェアキットです。本開発キットを活用することでブリッジ端末本体にLinuxアプリケーションを組み込んだり、タブレットやPC側で利用する稼働モニタリングアプリケーションを開発することができます。

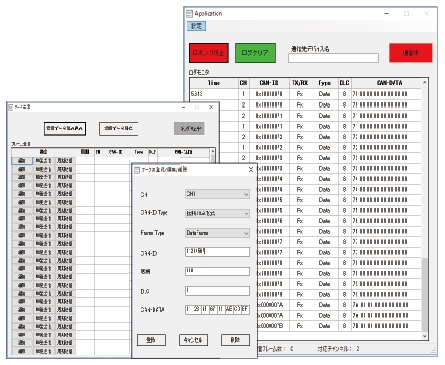
CAN Monitor Application(サンプルアプリケーション)
GDM-3350を使って、CANデータを無線LAN経由でモニタリングするためのWindows用サンプルアプリケーションです。CANデータを本アプリケーションから車両側に送信することもできますので、本体購入後すぐにCAN/無線LAN通信機能の評価が可能です。
※ 本ソフトウェアはこちらよりダウンロードできます。
仕様
| 型番 | GDM-3350 |
|---|---|
| 有線LANインタフェース | RJ-45×1 10Base-T / 100Base-TX(自動認識) |
| 無線LANインタフェース | IEEE 802.11a/b/g/n 2T x 2R(外部アンテナ) ■2.4GHz:1~13ch ■5GHz:W52/W53/W56 (W53/W56はDFSに対応) |
| デバイスインタフェース | CAN×2(CAN2.0B Active/ISO11898 High Speed) シリアル×1(RS-232C) NTSC映像入力×4 デジタル入力×2 (オープンコレクタ) デジタル出力×1 (オープンコレクタ, 最大出力電流150mA) ※1 |
| スイッチ | プッシュスイッチ×1 |
| LED | 本体×4 |
| 動作環境条件 | 温度条件:-30~+65℃ 湿度条件:15~95%RH(結露なきこと) |
| 保存環境条件 | 温度条件:-40~+85℃ ※2 湿度条件:15~95%RH(結露なきこと) |
| 電源 | DC10~30V |
| 最大消費電力 | DC24V/0.5A |
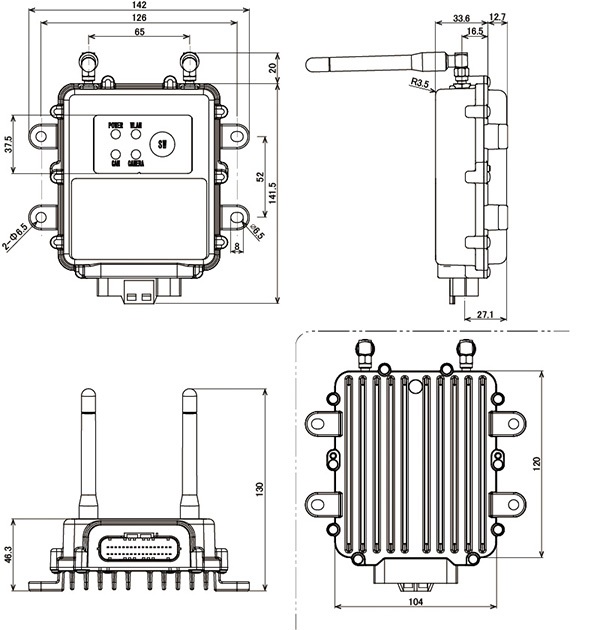
| 外形寸法 | 約142×120×46.3mm(本体のみ、突起物除く) |
| 重量 | 約580g(アンテナ含む) |
| 同梱物 | 本体、標準ポールアンテナ、設置マニュアル、GPLお知らせシート |
| 各種取得規格 | VCCI Class A、RoHS |
| システム | CPU: NXP社 i.MX6 Solo automotive RAM: 1GB 内蔵ストレージ: eMMC 16GB(疑似SLC/ユーザ利用可能13GB) |
| 筐体 | アルミダイキャスト |
| 防塵・防水 | 防水:JIS D0203 D2準拠 防塵:JIS D0207 F2準拠 |
| 対応ソフトウェア | CAN Monitor Application(サンプルアプリ) |
| 保証期間 | 5年 ※3 |
| 標準価格 | OPEN |
| 注釈 | ※1 制御機能は非実装 ※2 +65℃以上 1000 時間、+75℃以上 500 時間を超えないこと ※3 お客様車両機器に組み込んでご利用される場合、別途保証条件を設定 |
| 映像機能 | |
|---|---|
| 対応ブラウザ | Google Chrome, Microsoft Edge 動作確認済OS:Windows, Android ※4 |
| 最大転送画数 | 同時 4 in 1 (4画像を1画像にまとめて転送) |
| 最大解像度 | VGA (640 × 480) |
| 最大フレームレート | 30fps(解像度VGA、 転送画像数 ×1の場合) |
| カメラ向き | 右90度回転、 左右反転、 上下反転 |
| 映像フォーマット | 動画: H.264, Motion JPEG, 静止画: JPEG |
| 転送方式 | HTTP |
| 画像・映像記録 | ・トリガー静止画撮影、およびトリガー映像撮影開始・終了 ・ドラレコ録画(指定入力信号の設定前後時間で映像保存) ・常時録画(自動上書き対応) |
※4 全てのOSバージョンと対応ブラウザの組合せで動作を保証するものではありません。
| カメラ部仕様 | |
|---|---|
| 形体 | ポリアミド樹脂(黒色) |
| 環境耐性 | 動作保証温度:-30℃ ~ 70℃ |
| 防水・防塵:IP67相当 | |
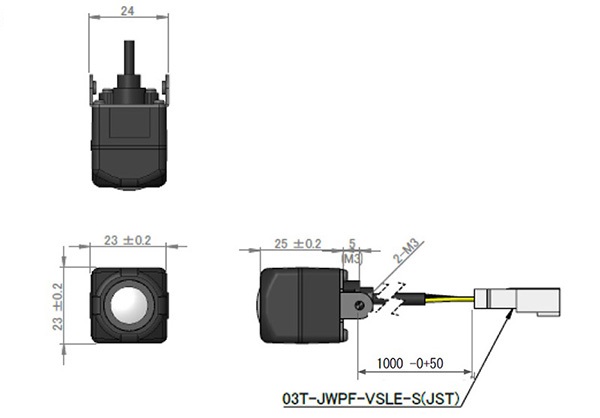
| 外形寸法 | 24(W) × 25(D) × 23(H) mm(突起部除く) |
| ケーブル長 | 100cm |
| 重量 | 40g |
| 動作電圧 | 6V ~ 12V |
| イメージセンサ | HDR機能搭載 1/4 CMOS Sensor |
| 画総数 | 有効画素数: 672(H) x 506(V), 出力画素数: 648(H) x 486(V) |
| 解像度 | 中心300TV本以上、周辺200TV本以上 |
| 画角 | 水平132°、垂直104°、対角164° |
| 照度範囲/F値 | 照度: 1~10万Lux、レンズF値: 2.0 |
記載された社名及び製品名は各社の登録商標または商標です。
改良のため、予告なく仕様を変更することがあります。
製品構成
| 名前 | 備考 |
|---|---|
| GDM-3350 | 本体、無線アンテナ2本、設置マニュアル類を同梱 |
| インタフェースケーブル | 別売:本機1台につき1本必要 ※5 |
| カメラ | 別売:本機1台につき最大4個まで取り付け可能 ※6 |
| 開発キット(ブリッジ端末用) ※7 | 別売: 開発環境、ドキュメント、サンプルコード同梱DVD |
| 開発キット(Windows OS用) | 別売: 開発環境、ドキュメント、サンプルコード同梱DVD |
| 開発キット(Android OS用) | 別売: 開発環境、ドキュメント、サンプルコード同梱DVD |
※5 最小構成はGDM-3350本体、I/Fケーブル1本になります(カメラ非利用時)。
※6 カメラは1個単位で取り付け可能です。必要数をご注文ください。
※7 GDM-3350専用のLinuxアプリケーション開発キットです。
※ 各開発キットに関しては弊社Webサイトの製品情報ページをご確認ください。
外観図
GDM本体
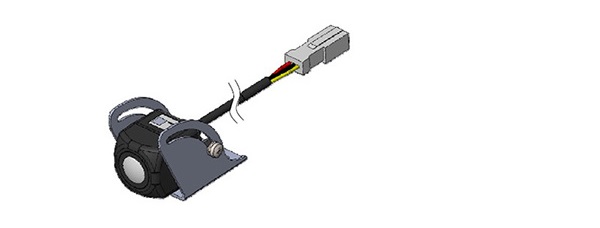
標準カメラ
外形寸法
ブラケット寸法
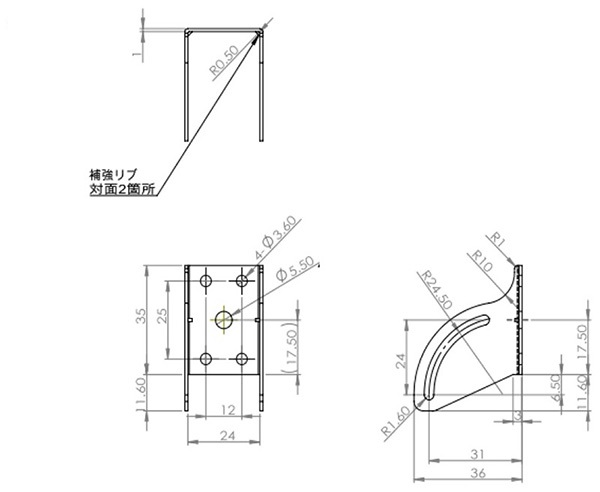
全体図
寸法:mm
インタフェースケーブル寸法
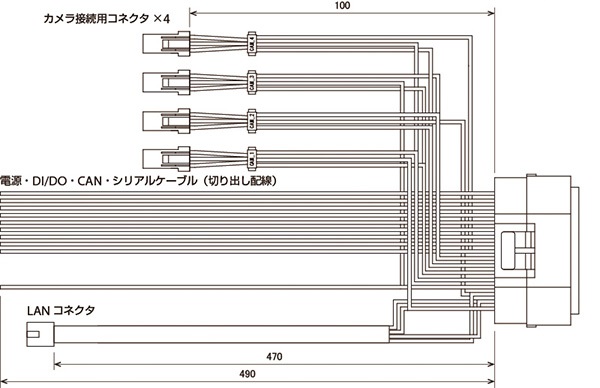
寸法:mm
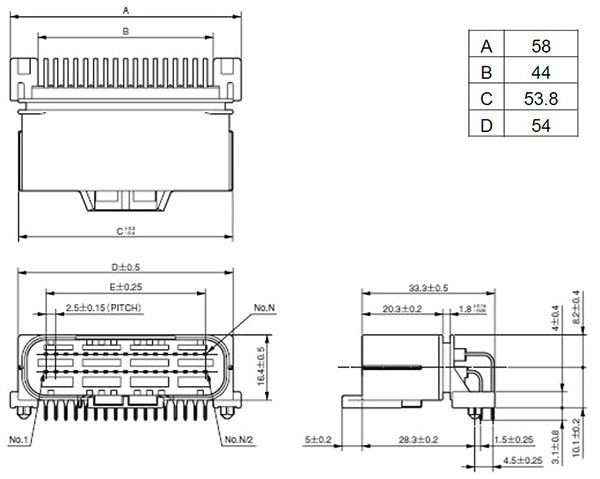
ケーブルピンアサイン情報
使用コネクタ:JAE製 MX23A34NF2(Reverse品)
| Pin | Signal | Direction | Description | Pin | Signal | Direction | Description |
|---|---|---|---|---|---|---|---|
| 1 | GND | - | CMR1 | 18 | RJ_RXP | I | LAN |
| 2 | RJ_TXM | O | LAN | 19 | RJ_RXM | I | LAN |
| 3 | RJ_TXP | O | LAN | 20 | GND | - | CMR2 |
| 4 | ACC | - | POWER | 21 | GND | - | CMR3 |
| 5 | CAMPWR | - | CMR1 | 22 | GND | - | CMR4 |
| 6 | CAMERA_1 | I | CMR1 | 23 | CAMERA_3 | I | CMR3 |
| 7 | CAMERA_2 | I | CMR2 | 24 | CAMERA_4 | I | CMR4 |
| 8 | CAMPWR | - | CMR2 | 25 | CAMPWR | - | CMR3 |
| 9 | DOUT1 | O | IO | 26 | CAMPWR | - | CMR4 |
| 10 | GND | - | IO | 27 | GND | - | SERIAL |
| 11 | 232_RXD | - | SERIAL | 28 | DIN_2 | I | IO |
| 12 | DIN1 | I | IO | 29 | CAN_R_2 | - | CAN2 |
| 13 | 232_TXD | - | SERIAL | 30 | CAN_H_2 | I/O | CAN2 |
| 14 | CAN_H_1 | I/O | CAN | 31 | CAN_L_2 | I/O | CAN2 |
| 15 | CAN_R_1 | - | CAN | 32 | GND | - | CAN2 |
| 16 | CAN_L_1 | I/O | CAN | 33 | GND | - | POWER |
| 17 | GND | - | CAN | 34 | B/U | - | POWER |


働く車のリモートモニタリング
近年、各自動車メーカはコネクティッドカーと呼ばれる、自動・快適運転・走行・車輛管理を目的としたネットワーク通信に対応した車両開発に力を入れています。これらは車両に搭載された各種センサやカメラ映像情報、また走行情報をクラウドサービスと連動し実現されるサービスですが、その基本となる速度・エンジン回転数、ブレーキや故障情報などの走行情報はCAN(Controller Area Network)という通信方式で車両内の各コントローラー(ECU: Electronic Control Unit)間でやり取りされています。
このCANによる車両内の制御通信は乗用車だけでなく、建設機械や農業機械などの"働く車"と呼ばれるカテゴリーの車両でも一般的に利用されています。この市場においては、建設現場や農地においていかに車両を効率的に稼働させ生産性を上げられるかが重要になります。そのため、各車両メーカでは自動走行・遠隔操作や、車両保守作業の効率化、稼働情報の分析による予防保全など様々な方法で生産性向上を目指しています。
これらの実現に必要とされるのが無線通信による稼働データの収集やリモート制御です。しかしながら、働く車と、通常の無線機器が対象とする一般オフィスでは無線機器が利用される通信条件や設置環境は大きく異なり、CAN通信の無線化には特別な対応が必要となります。
CANと無線LAN通信の違い
CAN通信はCAN 2.0Bという規格でも通信速度は最高1.0Mbpsでそのデータは通常29bit/フレームで送受信されます。他方、無線LANなどのIP通信は数十~数百Mbpsといった速度での通信でやり取りされており、送受信データは約1,500bit/フレームといったCANに比べて格段に大きなサイズの通信に最適化されています。
この想定された通信速度やデータサイズの違いにより、単純にCANフレームを個々にIPフレームに変換したのでは極めて非効率(大きなバケツで少量の水を送るようなもの)となってしまいます。
CAN・無線変換の最適化
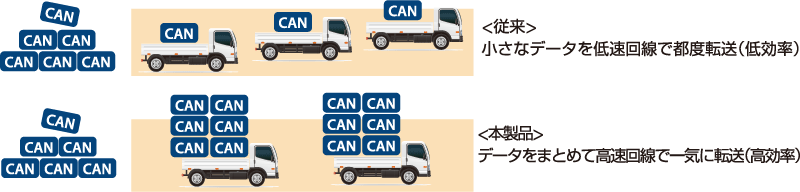
そのままでは非効率なCAN・無線/IP通信変換を効率的に行うには、細切れのCANフレームをIP通信に合わせた形に加工・取りまとめて最適化する必要があります。この作業は無線装置内部でCANフレームをIP通信に適したデータ量までバッファリングすることで実現できます。
このバッファリングにより『広帯域な無線LAN通信を活用できる』ことだけでなくTCP/IP通信を利用する場合の『データ再送効率の向上による通信遅延低減』や『無線端末側の通信負荷の低減/低発熱化』といった副次的な効果が得られます。特に低発熱は、防塵防水対策として密閉性が求められる働く車向け製品では必須となります。
通信距離の延長・遅延への対応
CANの無線化用途には、通信データの確実性を最優先とする制御用アプリケーションと、通信の継続性を重要視する監視用アプリケーションがあります。制御用途ではエラー再送に対応したTCPプロトコルを利用しますが、周辺環境や通信距離によってはデータ再送待ちや遅延が発生します。他方、監視用途では、データの完全性よりも通信距離の延長や遅延によるPC・タブレットなどの監視ソフト側からの通信断を避ける必要があります。この場合、エラー再送の無いUDPを利用するのが適しています。
用途に応じたIP通信方式を採用することで、リモートアプリで利用するタブレットPC・スマートフォン端末を効果的に活用できます。
映像情報の最適化
CANデータという車両情報と合わせて周辺映像を確認したいという要望があります。映像データはCANデータと比べて圧倒的にサイズが大きく、そのまま無線転送するとCAN通信用の帯域まで使ってしまいます。そのため、CANと映像情報をセットで無線転送する場合は、映像情報を効率的かつスマートに送信する必要があります。
複数のカメラ映像を1セットにして送信しデータ量を減らす。周辺の無線環境や通信速度の変化に応じて映像フレーム(fps)や画像品質を自動変更するといった対応が有効です。

PC・タブレットアプリケーション
車両のリモート監視・操作には、ノート・タブレットPCやスマートフォンといったモバイル端末の利用が一般的です。これら市販機器は入手性もよく、リモート監視・操作のためのアプリケーションを開発する環境も整っています。他方、それらの無線通信機能は一般的なオフィスやWi-Fiホットスポットでの利用を想定したもので、端末のバッテリーと省エネを考慮した動作に最適化されています。
このような市販モバイル端末を無線CAN通信で安定的に利用するためには、モバイル端末側の無線通信機能も安定動作させる必要があります。この点、よく発生する問題として『通信が瞬間的に停止・息継ぎしてしまう(無線モジュールのスリープ)』、『常に周辺の他のアクセスポイントを検索してしまう(バックグラウンドスキャン)』といったものが挙げられます。通常のWeb閲覧や電子メール送受信では全く問題無いこれらのmsレベルの動作のもたつきも、遅延にシビアなCAN通信においては大きな問題となります。
モバイル端末に搭載されたOS標準機能ではこれらの設定を詳細に変更するのは困難なため、車両アプリケーション側で常に端末の無線機能を最適な状態に維持する必要があります。

利用アプリケーションに応じた選択
CAN通信の無線化アプリケーションを市販モバイル端末で利用する場合、選択肢※は無線LAN(いわゆるWi-Fi)か
Bluetooth®となります。
無線LANは高速・大容量・複数端末の同時通信が可能です。複数のCANチャネルや負荷の高いCAN通信(1,000fps以上)を無線化、また複数のモバイル端末で利用したり、映像とセットで通信させる場合に適した通信方式です。また無線干渉の可能性が低い5GHz帯を利用できるメリットもあります。
他方、Bluetooth®は通信速度は無線LANに及びませんが、1対1でのペアリング通信に特化しているので簡単に設定・利用できます。周波数ホッピング機能により無線干渉に比較的強く、モバイル端末の消費電力も無線LANに比べ低いため長時間稼働できるといったメリットがあります。
通信できる距離は無線LANで数十m~100m程度、Bluetooth®では数m~10m前後※となるので、車両からどの程度の距離で目的のアプリケーションを使う必要があるかで無線方式を選択することになります。
※Class1対応製品では無線LAN並みの100m程度まで通信可能ですが、モバイル端末側もClass1に対応した製品である必要があります。

まとめ
CAN通信を無線化するには、CAN通信とIP通信の違いを考慮した無線機器を選択し、同時にモバイル端末アプリケーション側でも安定通信を実現する仕組みを設けるといった全体最適が必要になります。また、利用するアプリケーションに適した無線方式を選択することも重要です。
今後モバイル通信領域では高速・低遅延通信を特長とする5Gサービスの開始が予定されていますが、利用可能な地域やその品質レベル・通信費用など課題も多く残っており、普及するまでにまだ時間がかかると予想されます。それらを踏まえ、車両という屋外で利用される製品・アプリケーションに応じて、無線LAN・Bluetooth®・モバイル(LTE/5G)を組み合わせて利用するアプローチが引き続き主流となると思われます。